
반응형
250x250
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
Tags
- 비선형제어
- 궤환선형화
- control
- 백스테핑
- 궤환 선형화
- 나이퀴스트선도
- RL
- lateral dynamics
- 자동제어
- 보드선도
- Isaac Sim
- 우분투
- 횡방향 동역학
- 경로계획
- feedback linearization
- #! /usr/bin/env python
- 나이퀴스트
- 제어공학
- ros2humble
- Backstepping
- 강화학습
- 러닝 #운동 #동기부여
- 터미널 오류
- 2024적금
- humble
- 차량 동역학
- 오류
- ROS2
- Python
- FL
Archives
- Today
- Total
내 머릿속
자동제어/제어공학 (나이퀴스트 선도 그리기 1) 본문
728x90
반응형
SMALL
나이퀴스트 선도란?
주파수 영역에서 Closed-loop(폐루프) 시스템의 안정도를 Open-loop(개루프), 즉 루프함수 L(s)를 통해 안정도를 판별할 수 있는 선도입니다.
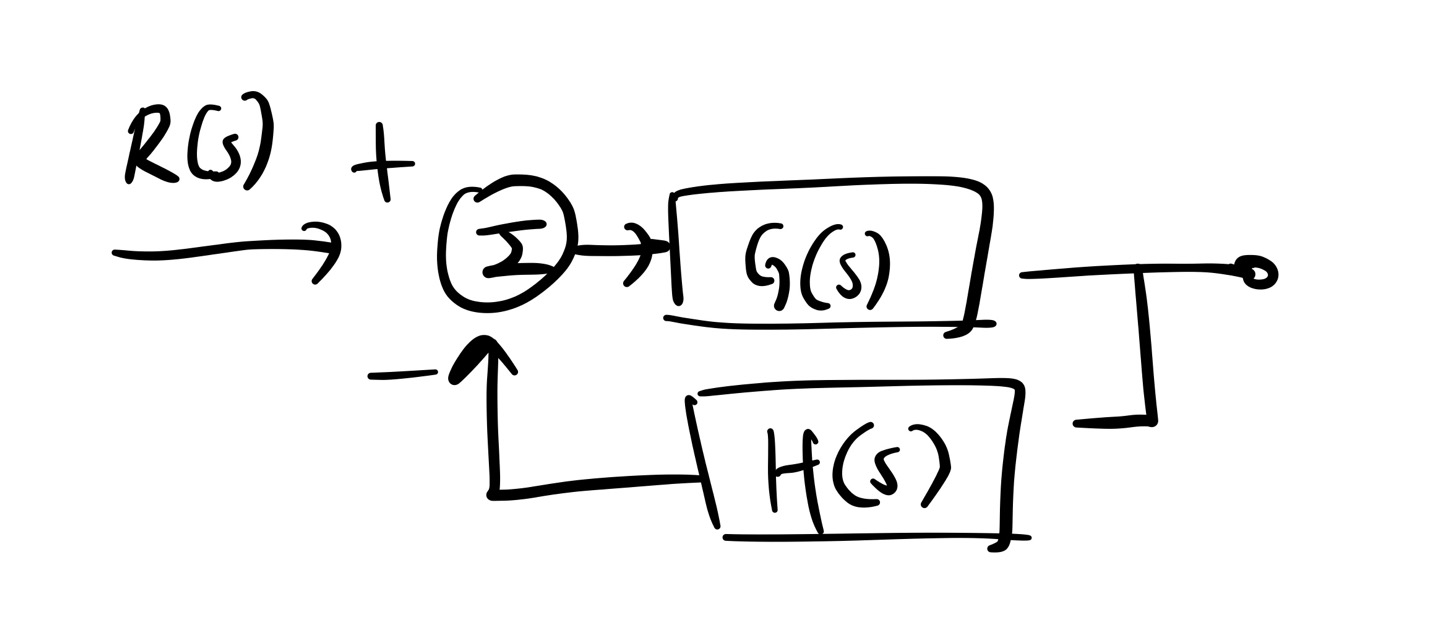
이렇게 폐루프 시스템의 안정도를 판별하고자 할때 사용하는데

이렇게 G(s)H(s)를 루프함수 L(s)로 표현해 분자분모를 pole과 zero로 표현할 수 있습니다.

이제 1+L(s)가 CLTF의 특성방정식이고

특성방정식의 분자인 Z(s)+P(s)= 0이 Closed loop pole이 됩니다.
정리하자면 OLTF의 분자 Z(s)와 분모 P(s)로
OLTF의 Pole : P(s) = 0
CLTF의 Pole : Z(s)+P(s) = 0
임을 알 수 있었습니다.
728x90
반응형
LIST
'전공과목 정리 > 자동제어' 카테고리의 다른 글
| 자동제어/제어공학 (나이퀴스트 선도 그리기 3) (0) | 2022.09.30 |
|---|---|
| 자동제어/제어공학 (나이퀴스트 선도 그리기 2) (0) | 2022.09.30 |
| 자동제어/제어공학 -5- (0) | 2022.07.19 |
| 자동제어/제어공학 -4- (매트랩 포함) (0) | 2022.07.18 |
| 자동제어/제어공학 -3- (0) | 2022.07.12 |
'전공과목 정리/자동제어' Related Articles
more



