
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
- 횡방향 동역학
- #! /usr/bin/env python
- humble
- 강화학습
- Isaac Sim
- 자동제어
- 궤환 선형화
- FL
- 궤환선형화
- lateral dynamics
- 경로계획
- Python
- RL
- 나이퀴스트선도
- 제어공학
- ros2humble
- 비선형제어
- feedback linearization
- 오류
- 2024적금
- 터미널 오류
- control
- 나이퀴스트
- 백스테핑
- 차량 동역학
- Backstepping
- 보드선도
- ROS2
- 러닝 #운동 #동기부여
- 우분투
- Today
- Total
내 머릿속
자동제어/제어공학 -3- 본문
저번에는 물리적현상에 대해 모델링을 해 입력에 대한 출력을 구했습니다. 그 과정에서 입력을 step이라는 것을 사용했는데 입력 함수에 대해 알아보겠습니다.
입력 함수
제어에서 입력값과 출력값의 오차가 줄게 될수록 좋은 제어라고 할수있습니다.
실제로는 여러가지 입력의 형태가 있지만 자동제어 과목에서 다루는 입력의 형태는 주로 Step function(계단함수)이고 Ramp function과 Impulse function, parabolic function 등이 있습니다.

원래 step 함수는 고등학교때 배웠듯 이런식으로 계단함수로 생겼습니다. 하지만 자동제어에서는 단위 계단함수를 사용하는데요.
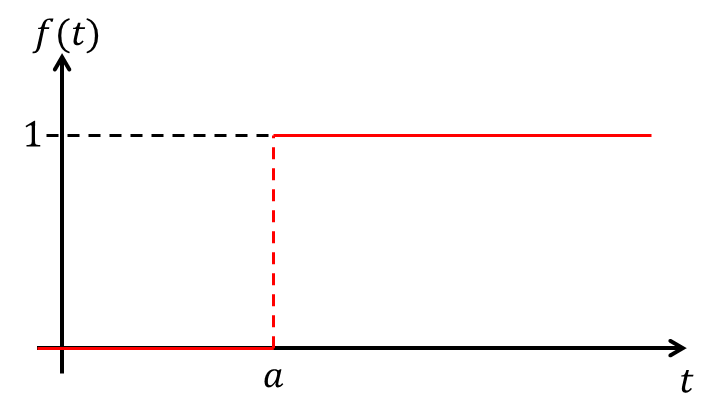
단위 계단함수는 이런식으로 a구간전에는 0 후에는 1의 값을 갖는 함수를 뜻합니다.
이 말은 즉슨, a구간 후에는 입력을 원래의 형태로 주는 것을 의미합니다.
예를 들어 입력 U(s)가 s+1 이였다면 a구간이후 (s+1)*1 (step) = s+1이 되는거죠

Ramp함수는 0을 기점으로 비례적으로 증가하는 함수입니다.
이제 이 함수들을 어디에 쓰느냐?
전달함수의 입력으로 쓰인다!
전달함수의 입력으로 쓰이는게 웬말이냐 하면 우리가 step함수 입력을 주었을때 결과가 어떻게 도출되느냐를 확인하는 것입니다. step함수는 마치 스위치를 키면 동작하는 느낌이기 때문에 시스템의 특성을 쉽게 파악해 볼 수 있습니다.
Rotational Motion
전에 크루즈 컨트롤 모델을 봤었는데 이번엔 1차원 회전하는 시스템을 전달함수로 만들어 보겠습니다.
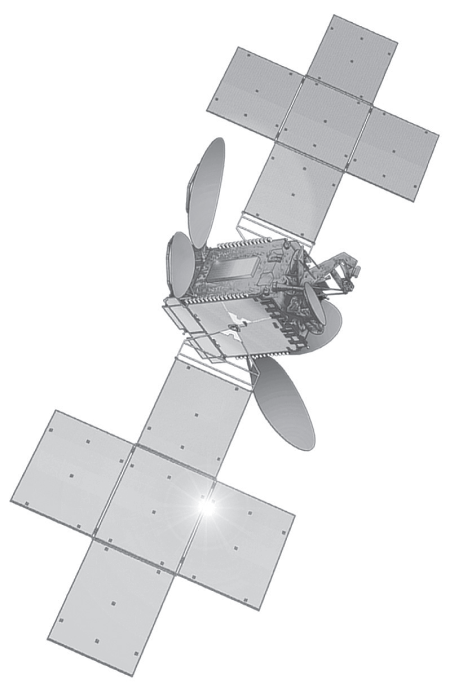

인공위성을 FBD로 그려보면 이런식으로 표현되는데 M_D는 인공위성에 작용하는 미소한 외란토크이고 Fc는 가스제트로 인공위성을 조절하기위한 힘입니다.
회전운동에 대한 운동방정식은 기본적으로 M = Iα 형태이고 위의 모델에 적용시키면
Fc*d + MD = Iθ¨로 표현할 수있습니다.
라플라스 변환을 통하면 M_D와 Fc*d를 하나의 제어입력 U(s)라 생각해
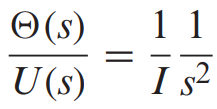
이런식으로 나타나게 되고 이를 매트랩으로 step입력에 대해 시뮬레이션 해보면

I의 값을 100이라고 가정하면 이런 응답을 얻을 수 있게 됩니다.
'전공과목 정리 > 자동제어' 카테고리의 다른 글
| 자동제어/제어공학 (나이퀴스트 선도 그리기 1) (2) | 2022.09.30 |
|---|---|
| 자동제어/제어공학 -5- (0) | 2022.07.19 |
| 자동제어/제어공학 -4- (매트랩 포함) (0) | 2022.07.18 |
| 자동제어/제어공학 -2- (매트랩/시뮬링크 포함) (0) | 2022.07.02 |
| 자동제어/제어공학 -1 (0) | 2022.06.30 |



