
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
- Backstepping
- 나이퀴스트선도
- 우분투
- 제어공학
- 궤환 선형화
- 나이퀴스트
- feedback linearization
- 차량 동역학
- 궤환선형화
- 2024적금
- ros2humble
- 오류
- 강화학습
- 보드선도
- 백스테핑
- control
- 러닝 #운동 #동기부여
- 경로계획
- RL
- 횡방향 동역학
- 터미널 오류
- #! /usr/bin/env python
- FL
- 자동제어
- lateral dynamics
- humble
- Isaac Sim
- ROS2
- 비선형제어
- Python
- Today
- Total
내 머릿속
자동제어/제어공학 -2- (매트랩/시뮬링크 포함) 본문
저번에 개로제어와 폐로제어까지 작성했었는데 결론적으로 원하는 출력값을 얻기위해서 제어기를 통해 원하는 값을 얻는것이 제어라 할 수 있습니다.
시스템 모델링
어떤 물리적, 전기적 현상을 제어하기 위해서는 모델링이 필요한데 모델링을 할땐 수식이 필요합니다. 기계공학에선 보통 움직이는 물체의 FBD를 그려 해석하는데 기초가되는 Cruise control model을 살펴보겠습니다.
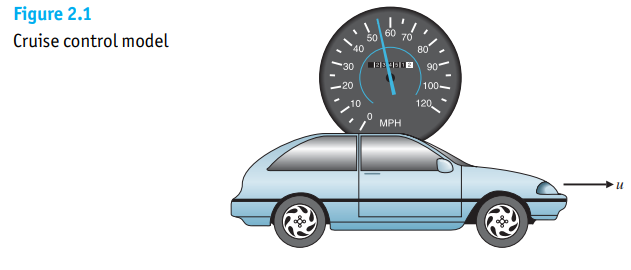
차량 동역학적으로 단순히 해석하면 EoM(Equation of Motion)을
mx'' = u -bx' 로 쓸 수 있습니다.
m은 차의 전체 질량 u는 힘 b는 마찰계수가 됩니다. 진행하는 방향과 반대되는 마찰력이 작용하므로 위의 식처럼 쓰입니다.
이제 전달함수 개념이 나오는데 쉽게 말해서 입력대비 출력이 얼마인가? 를 나타내는 함수입니다.
위의 예제에서 m과 b는 고정된 상수이고, u를 조절해 x값을 도출하므로 입력은 u, 출력은 x가 됩니다.

여기서 이제 미분방정식 EoM을 전달함수로 만들기 위해 라플라스 변환을 해주는데 공학수학에서 배웠듯 미분방정식을 쉽게 풀기 위해서 이용해줍니다. 물론 중간에 초기값정리가 생략됬는데 초기값은 0입니다.
이제 이 전달함수를 가지고 매트랩을 하게되면
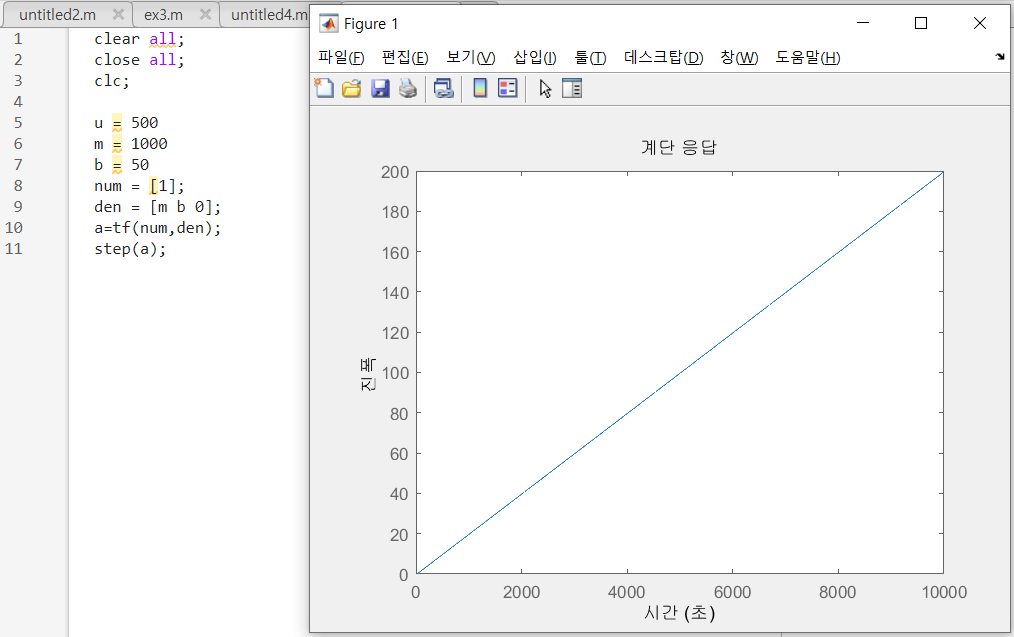
이렇게 나오게 됩니다. 이제 이 그래프에 대해 해석하면 전달함수 자체가 입력한 힘이고 출력값이 거리가 나오게 됩니다. 그래서 응답이 선형적으로 증가하고 이를 힘과 속도에 대해 해석할땐 전달함수에 s를 곱해주면 됩니다.

이제 입력한 힘 500N에 대한 속도의 응답이 그래프로 도출되는데 점점 증가하다가 10에 수렴하는 시스템입니다.
시뮬링크로 해보면
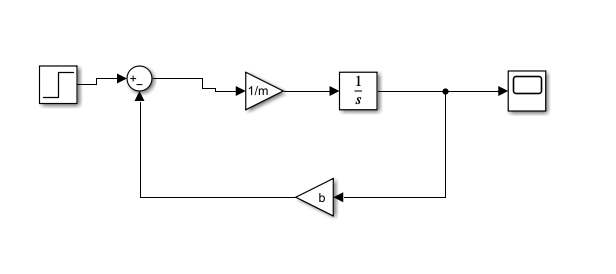
이런식으로 모델링 할 수 있습니다. 매트랩과 시뮬링크는 예제를 보고 본인이 요리조리 만져보면 이해가 더 빠르실거에요.
'전공과목 정리 > 자동제어' 카테고리의 다른 글
| 자동제어/제어공학 (나이퀴스트 선도 그리기 1) (2) | 2022.09.30 |
|---|---|
| 자동제어/제어공학 -5- (0) | 2022.07.19 |
| 자동제어/제어공학 -4- (매트랩 포함) (0) | 2022.07.18 |
| 자동제어/제어공학 -3- (0) | 2022.07.12 |
| 자동제어/제어공학 -1 (0) | 2022.06.30 |



